WHAT ARE YOU LOOKING FOR?
Popular Tags
Monitoraggio



Ricognizione delle strade forestali tramite rilievo drone. Considerazioni tecnico-pratiche sulla rappresentazione digitale della viabilità forestale
- APPROFONDIMENTO

Ascolta l'articolo
di Francesco Zanotto, Alberto Udali, Stefano Grigolato, Luca Marchi
I droni nell’ambito forestale possono rivelarsi strumenti adatti alla ricognizione della viabilità forestale esistente o di nuova realizzazione. L’articolo presenta e discute alcuni casi studio mettendo in evidenza la necessità di un approccio metodologico espressamente legato al contesto in cui si sviluppa la strada ed i diversi scenari di volo collegati all’ambiente circostante.
A partire dall’inizio degli anni 2000 nel settore forestale si sta assistendo ad un incremento dell’utilizzo di tecnologie sempre più efficienti e con un grado di digitalizzazione sempre più elevato. Tra queste, i velivoli a pilotaggio remoto - UAVs (Unmanned Aerial Vehicles) - comunemente noti come droni, sono diventati rapidamente una piattaforma di telerilevamento che ha dimostrato flessibilità di utilizzo e limitati costi di gestione, oltre che essere capace di fornire dati tempestivi ad alta risoluzione (Matese, 2020).
Inizialmente in via sperimentale, gli UAVs sono stati utilizzati in questo arco temporale in diverse attività forestali: mappatura delle foreste e della biodiversità, inventario forestale, valutazione delle infestazioni parassitarie, mappatura delle lacune delle chiome, misurazione dell'altezza delle chiome delle foreste, monitoraggio degli incendi boschivi, selvicoltura di precisione e monitoraggio a lungo termine degli ecosistemi (Scudder e Sampson 2025). La notevole flessibilità d’impiego — anche in contesti difficilmente accessibili — unita alla crescente disponibilità di soluzioni tecniche via via più specifiche, sta rendendo questi strumenti sempre più diffusi, non solo nella ricerca ma anche nella attività professionale.
Nello specifico, nell’ambito della selvicoltura di precisione, o nella sua accezione più inclusiva secondo la definizione di precision forestry, la rappresentazione tridimensionale delle foreste può essere utilizzata per molteplici applicazioni (Murtiyoso et al., 2024), tra cui quella della viabilità. Questo, infatti, rimane uno degli ambiti di applicazione meno esplorati finora, in cui il rilievo e la rappresentazione digitale della rete di viabilità possono essere utilizzati per la valutazione dello stato di fatto della rete viaria esistente al fine di ricostruire in modo rapido e speditivo le caratteristiche geometriche della strada, portando vantaggi sensibili rispetto ai metodi tradizionali in termini di velocità di rilievo ed efficienza (Hoseini et al. 2025).
L’utilizzo di droni equipaggiati con sensori fotogrammetrici o LiDAR consentono di restituire un’ortofoto georiferita o un modello digitale ad alta risoluzione. Prodotti di questo tipo sono utilizzati, per esempio, per determinare i volumi di scavo e riporto per la costruzione della strada (Türk e Canyurt 2024) o lo stato di manutenzione della stessa.
Con il principale obiettivo di fornire indicazioni operative utili all’ottenimento della rappresentazione digitale della viabilità forestale, il presente contributo presenta e discute i metodi di rilievo e i risultati ottenuti da alcuni casi studio.

Casi studio
Per capire i possibili vantaggi dell’applicazione di questi strumenti nella valutazione della viabilità forestale, sono stati rilevati 7 tratti provenienti da altrettante strade, distribuiti tra Veneto e il Friuli-Venezia Giulia, di cui 5 nella prima e 2 nella seconda. Per condurre la seguente attività sperimentale i voli sono stati eseguiti tramite drone professionale DJI Mavic 3 Enterprise con fotocamera RGB avente lunghezza focale equivalente da 24 mm, sensore CMOS da 4/3 e 20 MP con apertura f/2.8 e batterie standard LiPo 4S da 5.000 mAh.
I voli sono stati eseguiti “a vista” (definito VLOS, visual line of sight), ossia mantenendo sempre il contatto visivo con il drone e, quando non possibile, utilizzando osservatori disposti lungo il percorso e in contatto radio con l’operatore. Nello specifico, i voli sono stati eseguiti in modalità manuale pilotando manualmente il drone, e in modalità programmata, ossia completamente automatica, utilizzando in questo caso due tipologie di rilievo: il volo ad area e il volo lineare.
Nel volo manuale, una volta selezionato il tratto di strada, si è proceduto al rilievo scegliendo un’altezza di volo che permettesse di rimanere al di sotto della chioma degli alberi limitrofi e con velocità costante, con acquisizioni automatiche ad intervalli regolari compresi tra 1 e 3 secondi per tutta la lunghezza del tratto, sia all’andata che al ritorno.
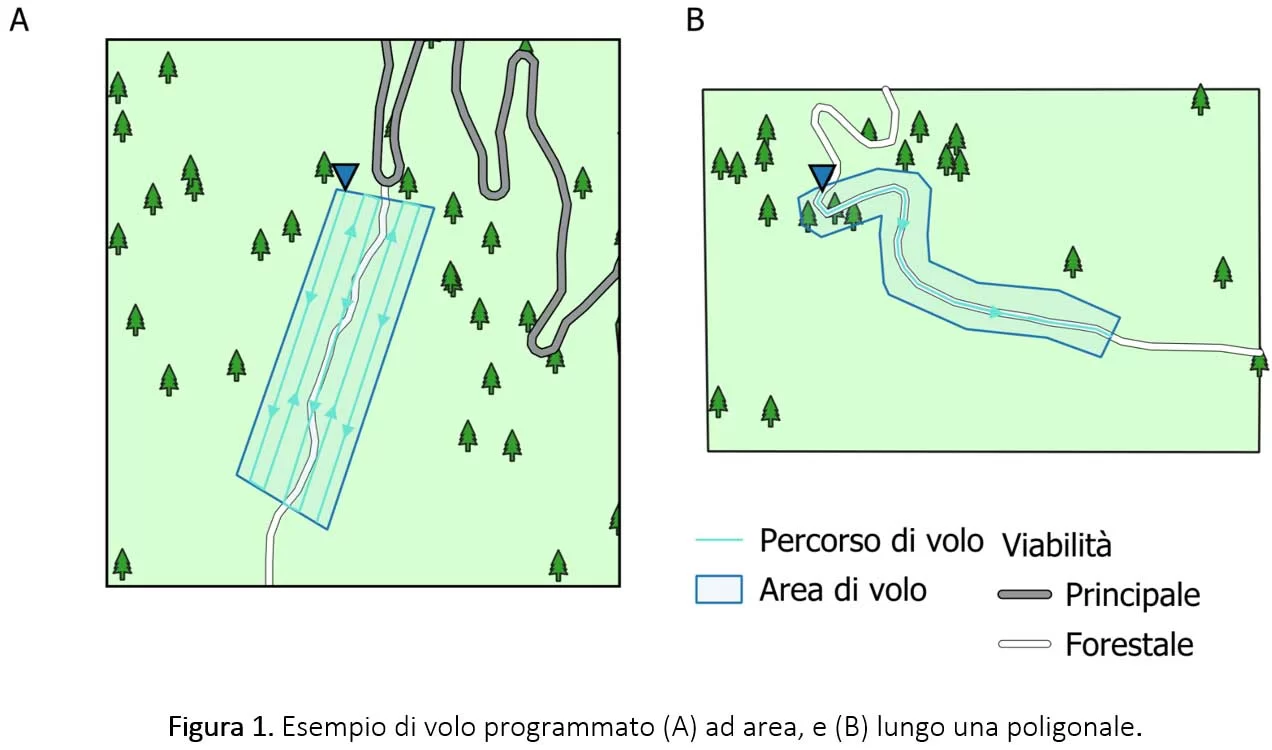
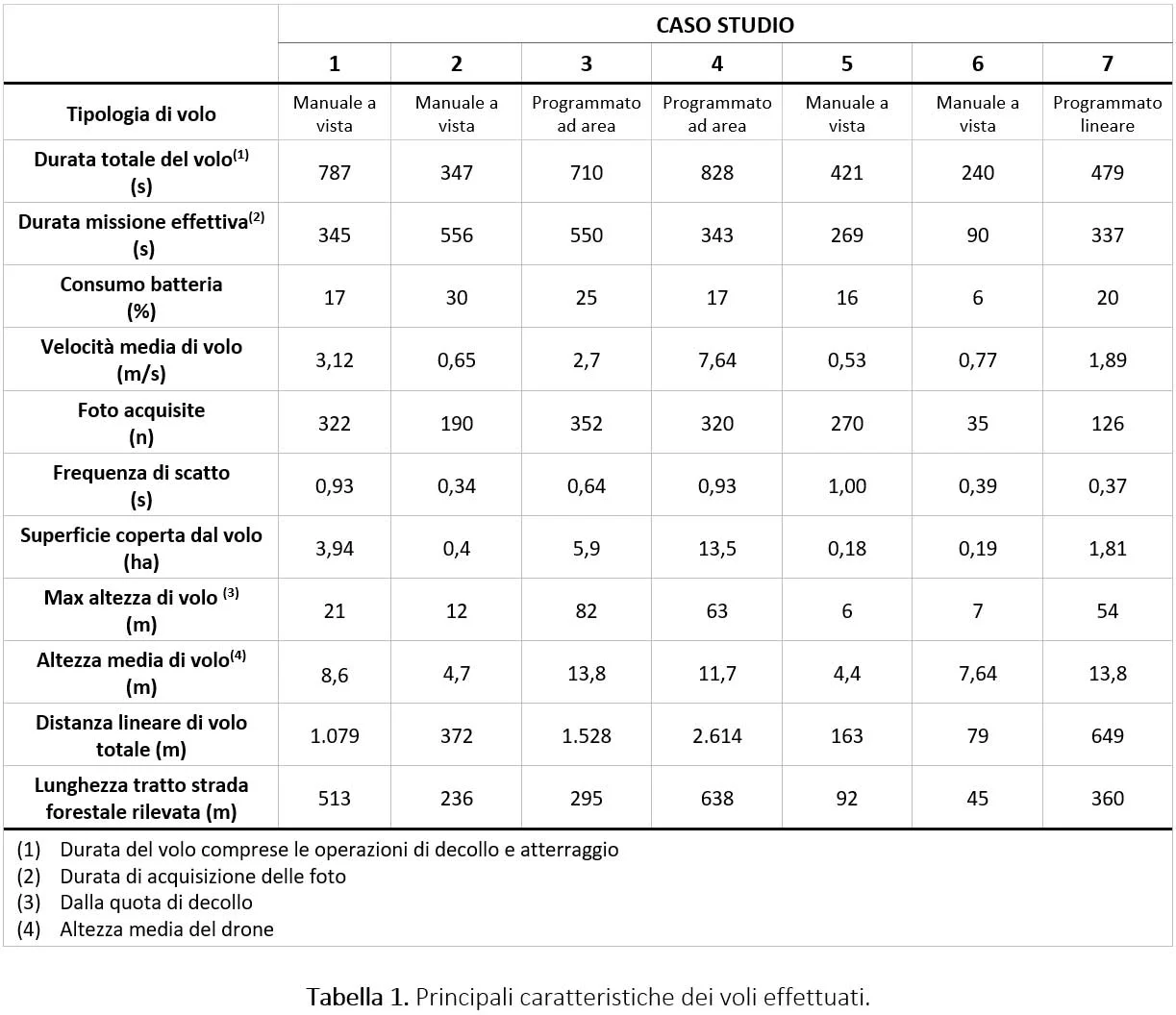
Nella modalità programmata, il pilota ha pianificato la missione di volo mediante un software specifico (in questo caso è stato usato DJI FlightHub2). In questa modalità è possibile operare sia identificando un’intera area da scansionare che includa entro di essa la strada oggetto di rilievo, che scansionando esclusivamente la strada stessa assieme ad una fascia di rispetto laterale di larghezza arbitraria. Nel primo caso (volo programmato ad area) il software automaticamente pianificherà un percorso di volo al fine di coprire l’intera area da scansionare (Figura 1A), invece nel secondo caso (volo programmato lineare) il drone seguirà la poligonale disegnata dall’utente percorrendola sia all’andata che al ritorno (Figura 1B). Ciò al fine di coprire lo stesso tratto per due volte, aumentando l’accuratezza finale ottenibile in fase di ricostruzione. Questa seconda modalità è infatti consigliata per il rilievo delle infrastrutture lineari. Entrambe le tipologie di volo programmato sono state pianificate direttamente in campo per tutti gli scenari. La Tabella 1 riporta le caratteristiche dei voli effettuati in questo studio.
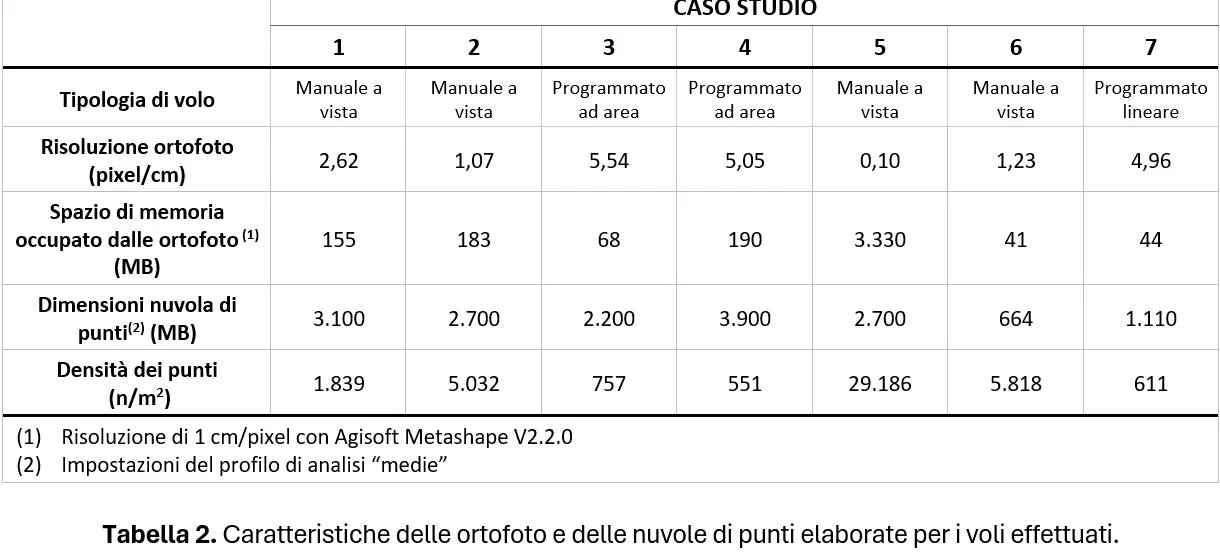
Durante il volo, il drone, contemporaneamente all’acquisizione delle immagini, registra costantemente anche la propria posizione, geolocalizzando automaticamente ciascuna foto. Le acquisizioni così ottenute possono essere analizzate ed elaborate utilizzando tecniche fotogrammetriche che permettono, dalla sovrapposizione delle immagini prese da due punti di vista leggermente differenti, di ricostruire un’immagine tridimensionale del terreno. In questo studio, le acquisizioni sono state elaborate con il software Agisoft Metashape V2.2.0 ottenendo due principali prodotti: un’ortofoto georeferenziata dell’intero rilievo e una nuvola di punti tridimensionale dalla quale estrapolare misure dirette del rilevato stradale. La Tabella 2 riporta le caratteristiche delle ortofoto e delle nuvole di punti elaborate con il software Agisoft Metashape, utilizzando le impostazioni di profilo di analisi “medie” individuate dal programma.
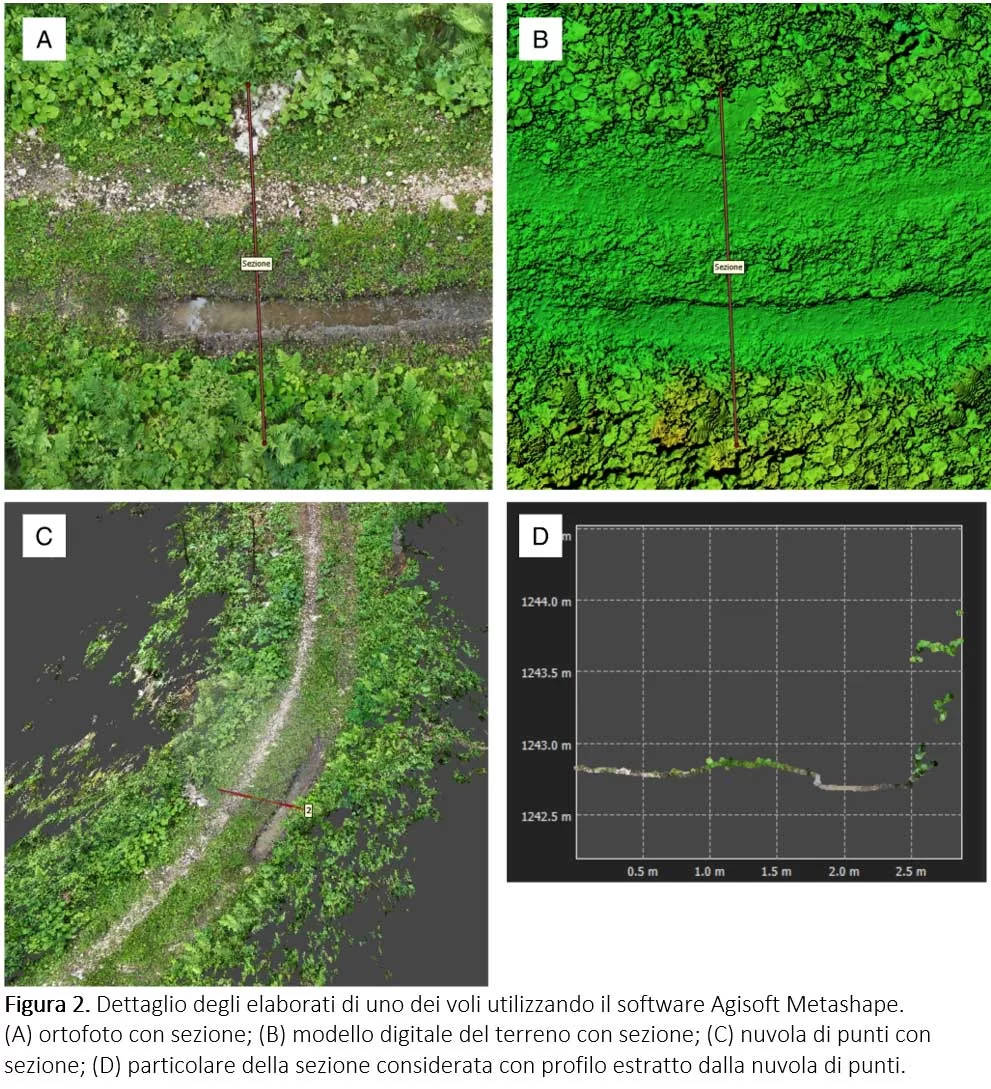
In Figura 2, viene riportato un dettaglio di alcuni dei prodotti restituiti dal software ad elaborazione conclusa. A partire dall’ortofoto generata è possibile valutare lo stato di fatto del tratto di strada esaminato. Ad esempio, nella sezione considerata (Figura 2, in rosso), è possibile individuare la presenza di ristagno d’acqua dovuto ad una depressione del piano viabile. L’entità di tale depressione si può facilmente individuare tramite la sezione del terreno presa dalla nuvola di punti (Figura 2D). Dalle stesse sezioni prese dalle nuvole di punti è inoltre possibile estrapolare, in maniera semi-automatica, diverse tipologie di informazioni come la larghezza della carreggiata, la pendenza trasversale della stessa, la pendenza delle scarpate in sterro e/o riporto.
Confronto dei risultati
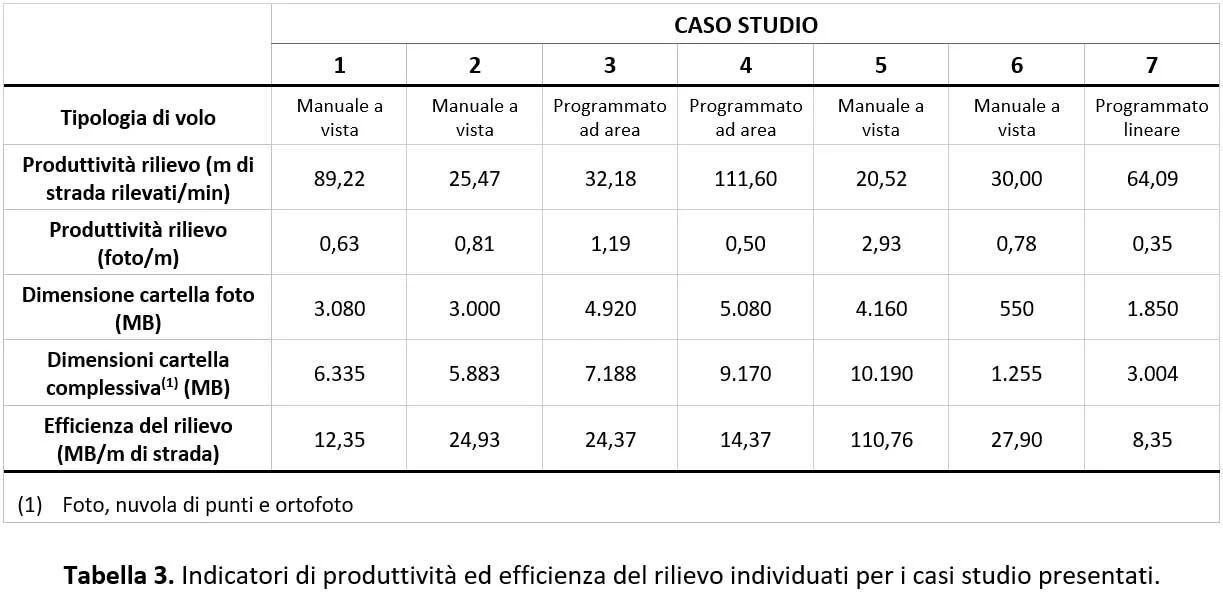
I risultati ottenuti dai casi studio riportano informazioni ad elevato dettaglio e appare chiaro come con entrambe le modalità di volo (manuale e programmato) sia possibile raggiungere un buon dettaglio di rilievo, generando una quantità di dati di dimensioni relativamente contenute ed effettuando le operazioni di rilievo in finestre temporali relativamente brevi. In questo modo è possibile coprire tratti di lunghezza considerevole in poche ore se si sfrutta appieno l’autonomia dei droni professionali moderni (tempo di volo utile circa 30-40 min). Di seguito sono riportati alcuni indicatori elaborati per valutare la produttività dei rilievi e i prodotti finali ottenuti dal processo fotogrammetrico (Tabella 3).
Dalle informazioni ottenute è possibile formulare un approfondimento su tre aspetti chiave, con esempi concreti tratti dai voli presentati.
Performance di volo
Per quanto riguarda la durata dei voli e la gestione della batteria, i voli manuali a vista variano da un minimo di 4 minuti (240 s, Volo 6) fino a oltre 16 minuti (787 s, Volo 1), con consumi tra il 6 % e il 30 % di batteria, mentre invece i voli programmati durano in media 12–14 minuti (710–828 s) e consumano il 17–25 % della carica, grazie a traiettorie più ottimizzate. Per quanto riguarda gli aspetti di velocità e stabilità, le velocità medie oscillano da 0,53 m/s (Volo 5, volo a vista ravvicinato per ortofoto ad elevatissima risoluzione) fino a 7,64 m/s (Volo 4, programmato ad area). Indicativamente, i voli programmati mostrano variazioni più contenute (2,7–7,6 m/s), mentre i voli manuali vanno da 0,65 m/s a 3,12 m/s, influenzando la regolarità delle sovrapposizioni tra scatti.
Acquisizione dati e risoluzione
Il secondo aspetto da sottolineare riguarda l’acquisizione dati e risoluzione, particolarmente influenzati dalla frequenza di scatto. Infatti, nel volo manuale con più acquisizioni (Volo 5) si arriva a 1 foto/s, mentre quello con meno foto (Volo 2) si ferma a 0,34 foto/s. I voli programmati si attestano tra 0,64 e 0,93 foto/s. In un’ora di volo programmato a 0,8 foto/s si acquisiscono oltre 2.800 immagini, contro meno di 1.300 in un volo lento – un dato critico quando serve densità per l’analisi 3D. Infatti, voli con una velocità di scatto più lenta forniscono, in media, nuvole di punti più dense, mentre velocità di scatto più elevate si traducono in una minore quantità di punti acquisiti ma con tempi di rilievo più veloci. Inoltre, questo si traduce in una maggiore risoluzione e peso dei file per le successive elaborazioni: la risoluzione delle ortofoto spazia da 0,10 cm/pixel (Volo 5) a 5,54 cm/pixel (Volo 3, volo programmato), con risultante variazione nella dimensione del file stesso, da poche decine di MB (41 MB, Volo 6) a oltre 3 GB (3.330 MB, Volo 5), e le nuvole di punti da 664 MB a quasi 4 GB (Volo 4).

Superficie coperta e produttività
Un ulteriore aspetto da considerare è quello della superficie coperta del rilievo e la produttività di rilievo in termini di metri lineari per minuto di volo. Per quanto riguarda la superficie coperta, il volo programmato su area ha coperto fino a 13,5 ha (Volo 4), mentre in media un rilievo manuale copre superfici inferiori all’ettaro, fatta eccezione per il Volo 1. I voli lineari – sia manuali sia programmati – hanno seguito fino a 638 m di strada forestale in un unico sorvolo (Volo 4, ad area), registrando la produttività di rilievo per metro lineare di strada forestale più alta, mappando sino a 111 m/min. La valutazione della produttività premia i voli programmati ad area, contro i voli lineari con una media di 69 m/min, mentre la media dei voli a vista risulta leggermente inferiore con 41 m/min. Nonostante questo, i voli che poi risultano produrre le nuvole di punti più dense sono quelli con la produttività compresa tra i 20–25 m/min. Relativamente all’efficienza, con l’esclusione del Volo 5, la media di efficienza di rilievo (MB per metro lineare di strada rilevata) si attesta a 19 MB/m, senza una chiara distinzione tra voli manuali e programmati.
Conclusioni
Le prove sperimentali presentate dimostrano come – combinando tipologia di volo, densità di scatto e risoluzione – si possano tarare missioni di volo su obiettivi diversi, anche all’interno dello stesso ambito di indagine, quale lo stato di fatto della viabilità forestale. Da questa esperienza e dalla valutazione degli aspetti chiave sopra considerati, scaturiscono alcuni suggerimenti pratici per quanto riguarda il rilievo della viabilità in foresta:
- Performance di volo. In missioni rapide o di emergenza dove serve massima autonomia residua, si privilegiano tratte manuali brevi; mentre invece per quanto riguarda rilievi più estesi e in situazioni complesse, il volo programmato garantisce maggiore prevedibilità e risparmio di energia complessiva. Per quanto riguarda il rilievo di strade forestali regolari e ampie, la programmazione dei voli assicura velocità costante e sovrapposizioni di foto omogenee. Per viabilità dove sono presenti zone a copertura fitta o con ostacoli, il volo manuale a velocità ridotte permette di effettuare aggiustamenti in rapidità e senza compromettere il rilievo.
- Acquisizione dati e risoluzione. La scelta di raggiungere risoluzioni elevate di copertura al suolo o nei prodotti finali dovrebbe essere riservata solo a necessità e usata con parsimonia (es. inventari dendrometrici o mappature di dettaglio), per non gravare eccessivamente su capacità e tempi di stoccaggio ed elaborazione dati.
- Copertura territoriale e produttività. Per rilievi lineari estesi (es. viabilità molto densa), è meglio preferire voli programmati con risoluzione moderata (4–5 cm/pix) per mantenere un grado di produttività adeguato (circa 20 MB/m), mentre invece per indagini puntuali e di dettaglio, il volo manuale con altezze di volo relativamente basse ed eseguiti sotto chioma garantisce una risoluzione elevata nel prodotto finale, sia nella nuvola di punti che nell’ortofoto.
Autori:
Francesco Zanotto, Dipartimento Territorio e Sistemi Agroforestali (TESAF), Università degli Studi di Padova
Alberto Udali, Dipartimento Territorio e Sistemi Agroforestali (TESAF), Università degli Studi di Padova
Stefano Grigolato, Dipartimento Territorio e Sistemi Agroforestali (TESAF), Università degli Studi di Padova
Luca Marchi, Dipartimento Territorio e Sistemi Agroforestali (TESAF), Università degli Studi di Padova
Ringraziamenti
Studio condotto nell’ambito del Centro Nazionale Agritech, finanziato dall'Unione Europea - NextGenerationEU (PIANO NAZIONALE DI RIPRESA E RESILIENZA (PNRR) - MISSIONE 4 COMPONENTE 2, INVESTIMENTO 1.4 - D.D. 1032 17/06/2022, CN00000022). I punti di vista e le opinioni espresse sono tuttavia solo quelli degli autori e non riflettono necessariamente quelli dell'Unione europea o della Commissione europea. Né l'Unione Europea né la Commissione Europea possono essere ritenute responsabili per essi.
Hoseini, M., Gobakken, H. R., Hoffmann, S., Horvath, C., Rahlf, J., Bjerketvedt, J., Puliti, S., & Astrup, R. (2025). RoadSens: An integrated near-field sensor solution for 3D forest road monitoring. Computers and Electronics in Agriculture, 229, 109710. https://doi.org/10.1016/J.COMPAG.2024.109710
Matese, A. (2020). Editorial for the Special Issue “Forestry Applications of Unmanned Aerial Vehicles (UAVs)” Forests 2020, Vol. 11, Page 406, 11(4), 406. https://doi.org/10.3390/F11040406
Murtiyoso, A., Holm, S., Riihimäki, H., Krucher, A., Griess, H., Griess, V. C., & Schweier, J. (2024). Virtual forests: a review on emerging questions in the use and application of 3D data in forestry. International Journal of Forest Engineering, 35(1), 34-47. https://doi.org/10.1080/14942119.2023.2217065/ASSET/F4B3E882-4460-48B7-ABE9-73C966EEE863/ASSETS/GRAPHIC/TIFE_A_2217065_F0006_OC.JPG
Scudder, M. G., & Sampson, L. E. (2025). Cost-Effective Forestry? A Systematic Literature Review of Drone Applications (2014–2024). Journal of Forestry, 1-23. https://doi.org/10.1007/S44392-025-00030-3/METRICS
Türk, Y., & Canyurt, H. (2024). Capabilities of using UAVs to determine forest road excavation volumes in mountainous areas. Sumarski List, 148(3–4), 139-152. https://doi.org/10.31298/SL.148.3-4.3
Lascia un commento
Crediamo fermamente che creare un dialogo costruttivo con i nostri lettori possa costruire una comunità di appassionati, permettere di approfondire i temi trattati e arricchire tutti. Per questo motivo abbiamo attivato la sezione “commenti”.
Commentare un articolo è un'opportunità per partecipare alla conversazione pubblica e condividere le proprie opinioni. Partecipa anche tu alla discussione!
I commenti saranno moderati dalla redazione per assicurare che siano pertinenti, rispettosi e in linea con le nostre linee guida.
Crediamo fermamente che creare un dialogo costruttivo con i nostri lettori possa costruire una comunità di appassionati, permettere di approfondire i temi trattati e arricchire tutti. Per questo motivo abbiamo attivato la sezione “commenti”.
Commentare un articolo è un'opportunità per partecipare alla conversazione pubblica e condividere le proprie opinioni. Partecipa anche tu alla discussione!
I commenti saranno moderati dalla redazione per assicurare che siano pertinenti, rispettosi e in linea con le nostre linee guida.
ULTIMI ARTICOLI e NOTIZIE
Quando la storia di un bosco diventa fumetto: dai Monti Dauni una nuova idea di divulgazione forestale
“Un bosco da vivere. La storia di un parco speciale”, è il nuovo fumetto realizzato dalla cooperativa Ecolforest per festeggiare i dieci anni di attività del parco “Daunia avventura”

Pioppo e bioeconomia: a Palazzo Chigi proposte autorevoli per un Piano Nazionale
Una sintesi dell'interessante documento su “Azioni dirette al rafforzamento della bioeconomia circolare del pioppo”, prodotto a maggio dal Comitato nazionale per la Biosicurezza, le Biotecnolog

Progetto RESONATE: partecipa al questionario online sul futuro delle terapie basate sulla natura
Partecipa al questionario del progetto RESONATE entro il 20 luglio. Bastano 10-15 minuti per contribuire alla ricerca sul futuro delle foreste europee e sulla loro resilienza ai cambiamenti climati

Articoli Forestali: il punto di riferimento per strumenti e attrezzatura per i rilievi forestali
Articoli Forestali dispone di un’ampia gamma di strumenti e attrezzature per effettuare misurazioni e rilievi in bosco, rivolti a tutte le figure coinvolte nella gestione forestale.


 E poi Aggiungi alla schermata principale.
E poi Aggiungi alla schermata principale.